GeoWerkstatt-Projekt des Monats August 2017
Projekt: Dem Auto das Sehen beibringen
Forschende: M.Sc. Alexander Schlichting
Projektidee: Lokalisierung selbstfahrender Fahrzeuge durch Laserscanning-Daten
Als Mensch nehmen wir unsere Umgebung beim Autofahren vornehmlich mit dem Auge wahr. Außerdem ist in unserem Gehirn eine Art Karte abgespeichert, über die wir uns orientieren können. Fahren wir nun durch unsere Heimatstadt, so erkennen wir Landmarken wie bspw. Gebäude wieder, wissen wo diese sich befinden und können so wiederum unsere Position bestimmen. Außerdem können wir durch einen einfachen Blick auf die Straße sagen, auf welchem Fahrstreifen wir fahren und wie weit es noch bis zur nächsten Kreuzung ist.
Bei selbstfahrenden Fahrzeugen fällt die beachtliche Leistung der menschlichen Sinnesorgane in Verbindung mit dem Gehirn weg. Stattdessen verfügen sie über einen Computer und verschiedene Sensoren, wie Kameras, Radar, Laser- und GNSS-Sensoren. Die grobe Positionsbestimmung kann normalerweise über GNSS-Sensoren (Globales Navigationssatellitensystem) wie bspw. GPS erfolgen, so wie es auch in herkömmlichen Navigationssystemen der Fall ist. Nur ist die Genauigkeit solcher Systeme insbesondere in städtischen Bereichen durch hohe Gebäude oder Bäume am Straßenrand auf zum Teil mehrere Meter beschränkt. Und was passiert eigentlich, wenn das System aus unbestimmten Gründen ausfällt?
Am Institut für Kartographie und Geoinformatik werden Laserscanner zur Positionsbestimmung verwendet. Laserscanner senden und empfangen pro Sekunde tausende von Laserimpulsen aus. Über die bekannte Laufzeit (Lichtgeschwindigkeit) kann die Distanz zum gemessen Punkt bestimmt werden, von dem der Strahl reflektiert wurde. Da auch der Winkel zum jeweiligen Sendezeitpunkt bekannt ist, können im nächsten Schritt aus Winkel und Distanz die Koordinaten des Punktes berechnet werden.

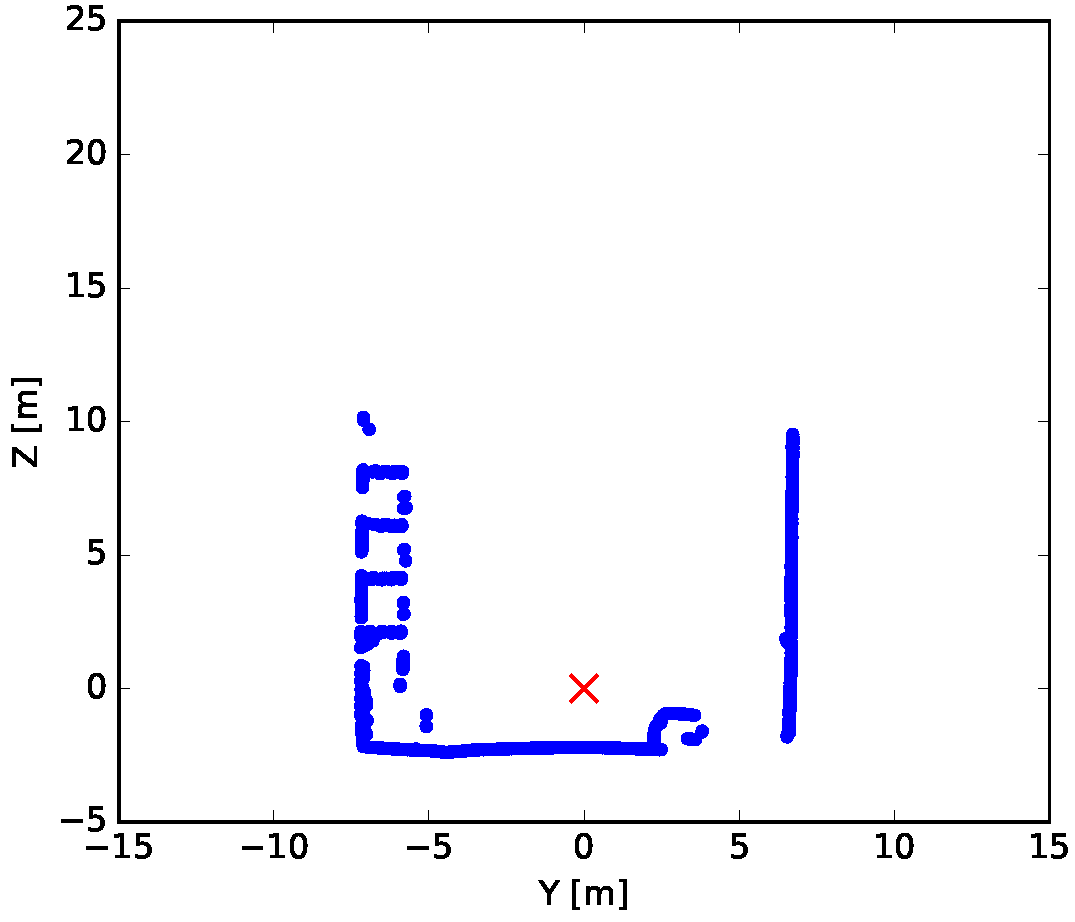
In unserem Fall ist ein solcher Laserscanner so am Fahrzeug angebracht, dass er vertikal zur Fahrtrichtung Scanprofile misst (siehe Abbildung 1 und 2). Der Computer analysiert das Scanprofil und weist ihm eine bestimmte Klasse zu. Mehrere aufeinanderfolgende Scanprofile, denen jeweils eine Klasse zugewiesenen wurden, ergebenen nun eine Sequenz an Klassen. Diese Sequenz kann mit Referenzsequenzen im Computer verglichen werden. Bei dieser Referenz sind zu jeder Sequenz auch die Welt-Koordinaten in einer Datenbank gespeichert. Über einen Abgleich der Sequenzen kann man so die Koordinaten der aktuellen Fahrzeugposition bestimmen. An der Stelle, an der sich die Sequenzen besonders ähnlich sind, befindet sich also das Fahrzeug.


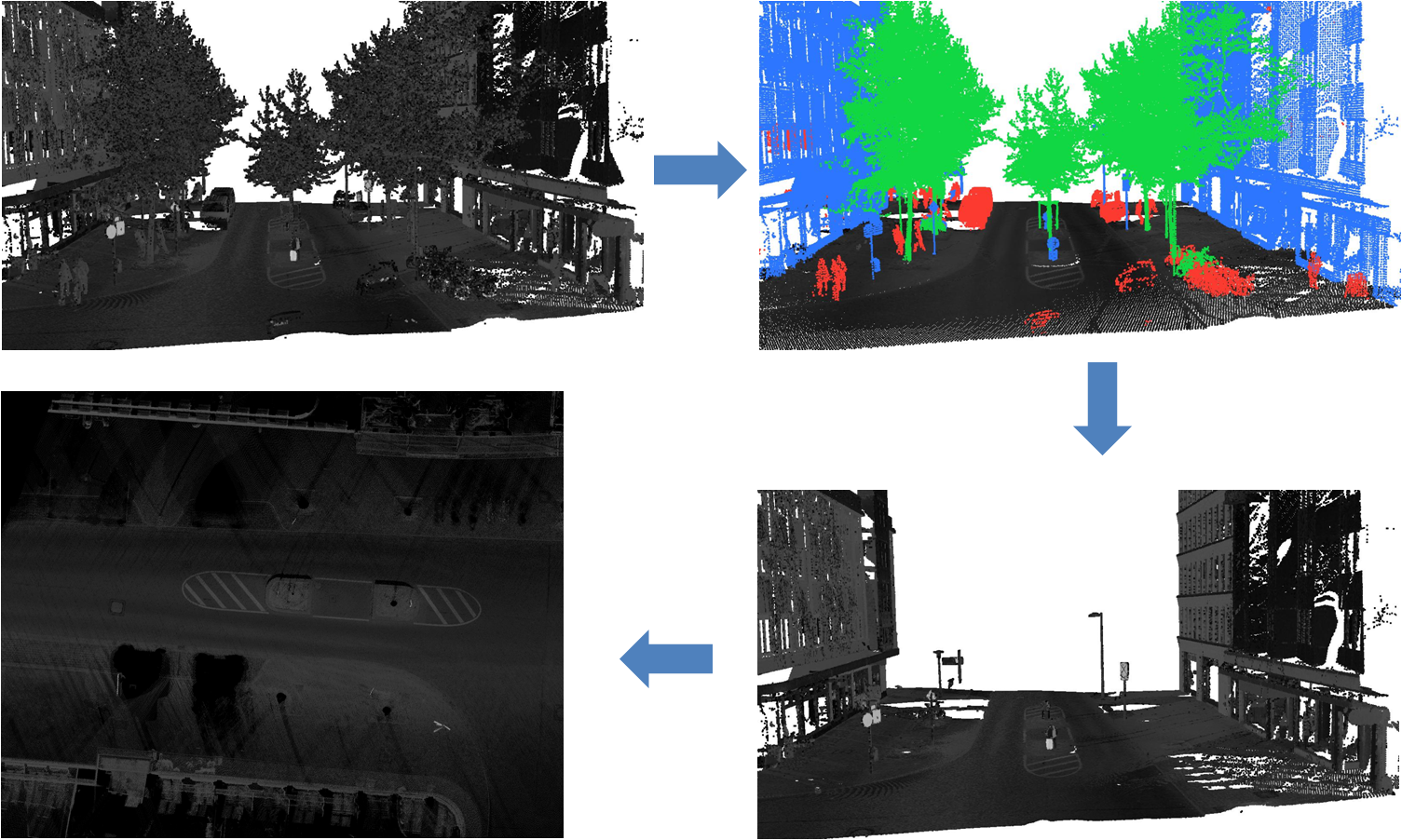
Über das beschriebene Verfahren kann ein Fahrzeug auf wenige Meter genau bestimmen, wo es sich in der Stadt befindet. Zur hochgenauen Positionsbestimmung, um bspw. sagen zu können, auf welchem Fahrstreifen sich der Wagen befindet, sind Genauigkeiten im Dezimeterbereich nötig. Hierzu werden die gemessenen Scanprofile direkt mit einer Referenzkarte verglichen, die Messungen eines hochgenauen Messfahrzeuges enthält. Dieses sogenannte Mobile-Mapping-System ist in Abbildung 3 und 4 dargestellt. Es enthält zwei Laserscanner, die jeweils bis zu 300.000 Punkte pro Sekunde messen können. Über eine Kombination aus GNSS-, Beschleunigungs- und Drehratensensoren sind zu jedem Aufnahmezeitpunkt die Fahrzeug-Koordinaten und somit auch die Koordinaten eines jeden Messpunktes mit einer Genauigkeit von 10-20 cm bekannt. Dynamische Objekte, wie Fahrzeuge, Fußgänger oder auch Bäume, werden durch einen Abgleich der Daten mehrerer Messfahrten detektiert und aus der Karte entfernt. Abbildung 5 zeigt den Ablauf zur Erstellung dieser Referenzkarte.
Neben den gemessenen Distanzen werden auch die Intensitätswerte der reflektierten Laserstrahlen mit der Referenzkarte verglichen. Nach dem Abgleich der Scanprofile mit dieser hochgenauen Referenzkarte ist es dem Computer möglich, die Position des selbstfahrenden Fahrzeuges auf wenige Dezimeter zu bestimmen. So weiß es, auf welchem Fahrstreifen es sich befindet und wie weit es noch zur Haltelinie an der nächsten Ampel ist.