GeoWerkstatt-Projekt des Monats August 2018
Projekt: Deep Learning of User Behavior in Shared Spaces
Forschende: Hao Cheng, Monika Sester (DFG Research Training Group 1931)
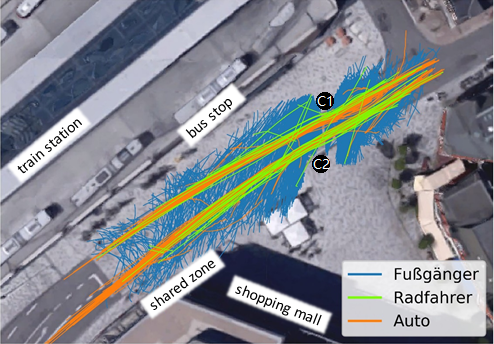
Projektidee: Modellierung von Mischverkehrstrajektorien mit Kollisionsvermeidung auf gemeinsam genutzten Verkehrsflächen ("Shared Spaces") mittels Deep Learning
Shared Spaces – das sind Verkehrsflächen, auf denen Verkehrszeichen und Straßenmarkierungen entfernt werden, um direkte Interaktionen von Fußgängern, Fahrradfahrern und Kraftfahrzeugen zu ermöglichen. Dieses alternative Verkehrsdesign hat zum Ziel, ohne ausdrückliche Verkehrsregeln das Vorankommen von Fußgängern zu fördern und die Dominanz von Kraftfahrzeugen zu reduzieren. Als Konsequenz müssen alle Verkehrsteilnehmer informelle soziale Regeln befolgen und sich untereinander abstimmen, um Kollisionen zu vermeiden und ihre eigene Sicherheit zu gewährleisten. Ein genaues Verständnis des Verhaltens der Verkehrsteilnehmer und die korrekte Vorhersage dieses Verhaltens sind unerlässlich, damit auch autonome Fahrsysteme Shared Spaces nutzen können und um das Verkehrsmanagement auf diesen Flächen zu unterstützen.
Dieses Projekt ist ein Teilprojekt des Graduiertenkollges SocialCars (DFG Research Training Group 1931), dessen Ziel es ist, den zukünftigen, urbanen Straßenverkehr signifikant zu verbessern. Unterstützt durch eine gründliche Untersuchung und Modellierung des Mischverkehrs auf Shared Spaces könnte das "Road-Sharing"-Konzept helfen, eine Antwort auf die Hauptfragestellung von SocialCars zu geben: "Wie können einzelne Verkehrsteilnehmer die Verkehrsinfrastruktur optimal nutzen, sodass sich die Sicherheit erhöht und gleichzeitig Überlastung und Umweltverschmutzung reduziert werden?"

Die Modellierung des Mischverkehrs auf Shared Spaces ist aufgrund der Heterogenität der Verkehrsmittel, der dynamischen Umgebungen und Raumgestaltungen (z. B. parkende Autos) sowie der verschiedenen demographischen Attribute der Verkehrsteilnehmer (z. B. Alter, Geschlecht, Zeitdruck) eine große Herausforderung. Die existierenden Modelle (z. B. das "Social Force"-Modell), ursprünglich nur für die Bewegungen von Fußgängern entworfen, sind für diese Zwecke nicht ausreichend. Daher werden in diesem Projekt datenbasierte Ansätze angewendet, insbesondere neuronale Netze auf Grundlage von Deep Learning, um flexible und robuste Modelle zu erstellen, die vorhersagen können, wie sich die verschiedenen Verkehrsteilnehmer bewegen und Kollisionen vermeiden.
Deep Learning-Modelle werden zunächst mittels realer Daten trainiert: Die Verhaltensmuster von Verkehrsteilnehmern werden aus Beobachtungen von realen Verkehrssituationen abgeleitet und erlernt. Im nächsten Schritt werden die Modelle verwendet, um die zukünftigen Trajektorien der Verkehrsteilnehmer, also die Bewegungsmuster, vorherzusagen.
Letztlich sollen in dem Projekt verschiedene realistische Situationen des Mischverkehrs in Shared Spaces mit unterschiedlichen Layouts und Kontexten modelliert werden. Ein Offline-Training- und Tuning-Framework und eine Online-Vorhersage (Echtzeitvorhersage) sollen ebenfalls zum Einsatz kommen. Zudem soll eine Lösung für autonome Fahrsysteme in Shared Spaces bereitgestellt werden, die Absichten der anderen Verkehrsteilnehmer einschätzt (Intensionsbestimmung) und On-Board-Warnsysteme beinhaltet.
Um eine hohe Qualität und stetige Verbesserung der Modelle zu gewährleisten, werden die Vorhersagen von Trajektorien durch die Modelle mit Trajektorien verglichen, die in realen Verkehrssituationen beobachtet wurden. Dabei werden Positionsabweichungen, Fahr- oder Gehgeschwindigkeit und die Bewegungsrichtung einbezogen. Die Leistung der Modelle wird zudem mit anderen etablierten Modellen verglichen, die den gegenwärtigen State-of-the-Art darstellen.





