GeoWerkstatt-Projekt des Monats Juni 2017
Projekt: Fahrzeugdetektion für das autonome Fahren der Zukunft
Forschende: Max Coenen
Projektidee: Detektion und Lokalisierung von Fahrzeugen zur Verbesserung der Sicherheit beim autonomen Fahren
Dieses Projekt beschäftigt sich mit der gegenseitigen kamerabasierten Positionierung von Fahrzeugen als Knoten eines dynamischen Sensornetzes. Auf der Grundlage von Stereobildern, welche von an Fahrzeugen angebrachten Stereokameras im Straßenverkehr aufgenommen werden, ergibt sich hieraus ein komplexes Fahrzeugerkennungs- und -verfolgungsproblem. Darüberhinausgehend soll eine Feinlokalisierung der detektierten Fahrzeuge durch die Einpassung eines objektspezifischen 3D-Modells erfolgen, aus welcher geeignete Merkmale („dynamische Passpunkte“) für die relative Positionierung der Fahrzeuge in Bezug auf die anderen Sensorknoten abgeleitet werden können.

Aktuell erfolgt die Fahrzeugdetektion durch die Kombination eines objektspezifischen 2D-Detektors mit einem generischen 3D-Objektdetektor, für welche sowohl Bildinformation als auch aus den Stereobildern erhaltene 3D-Information als Datengrundlage verwendet wird. Die durch den spezifischen Sensoraufbau gegebene Aufnahme von Straßen-Level Stereobildern ermöglicht die Detektion der Straßenebene sowie die Verwendung plausibler Annahmen über geometrische und lagebezogene Objekteigenschaften von Fahrzeugen, welche für die Fahrzeugdetektion genutzt und in diese integriert werden können.
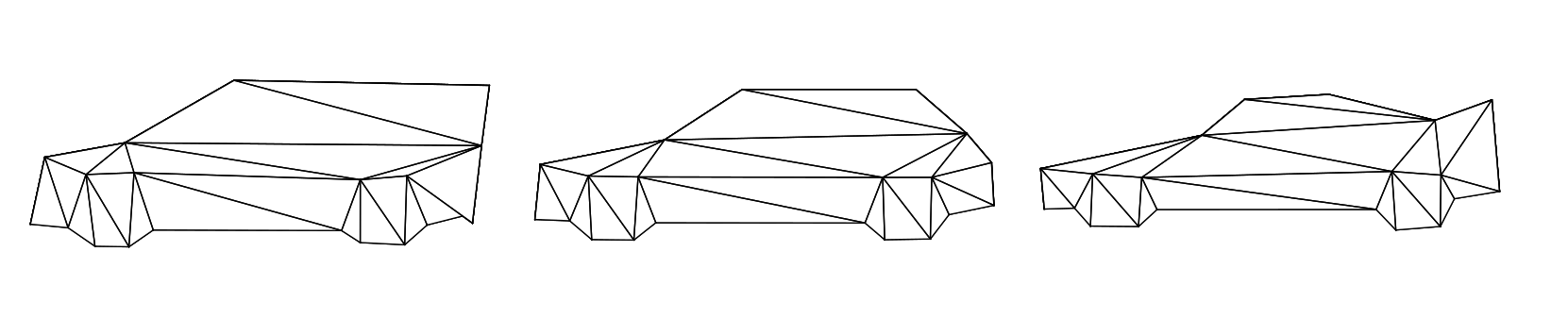
Sogenannte „Active Shape Models“, welche aus CAD-Fahrzeugmodellen erlernt und in die detektierten Objekte eingepasst werden können, dienen derzeit als Grundlage für die Feinlokalisierung der Fahrzeuge. Aus der dadurch erzielten parametrisierten Rekonstruktion der Fahrzeuge können Ergebnisse für die Position, Orientierung und Form der Fahrzeuge abgeleitet werden.





