GeoWerkstatt-Projekt des Monats Dezember 2016
Projekt: Ableitung von Verkehrsregeln aus Fahrzeugsensorik
Forschende: M.Sc. Stefania Zourlidou, Prof. Monika Sester
Projektidee: Aus dem Bewegungsverhalten der Verkehrsteilnehmer lassen sich durch Mustererkennung die vor Ort gültigen Verkehrsregelungen ableiten. Auf diese Weise können hochaktuelle, detaillierte und dynamische Karten für Fahrerassistenzsysteme und Navigation erstellt werden.
Die Nutzbarkeit einer Karte wird vor Allem durch ihren Informationsgehalt, ihre Genauigkeit und ihre Aktualität bestimmt. Gerade in innerstädtischen Gebieten verändern sich die Umgebung und Verkehrsführung relativ schnell: So werden neue Straßen gebaut, alte saniert und häufig ergeben sich durch geplante oder ungeplante Faktoren (z.B. Baustellen oder Wettereinflüsse, etc.) Umleitungen in der Verkehrsführung. Unter diesen dynamischen Einflüssen wird die Qualitätssicherung der Karten für Fahrerassistenz oder Navigation zu einer Herausforderung.
Lokale Verkehrsregelungen durch Beschilderung (z.B. „Vorfahrt achten“, „rechts abbiegen“, etc.), oder Ampeln spielen eine wichtige Rolle in den genannten Anwendungsszenarien. So kann eine Warnung eines Fahrers, welcher sich mit überhöhter Geschwindigkeit auf ein Stoppschild zu bewegt, lebensrettend sein. In diesem Fall liegt die Herausforderung in der automatischen und dynamischen Ableitung der Verkehrsregelung mit der bestehende Karten angereichert werden.
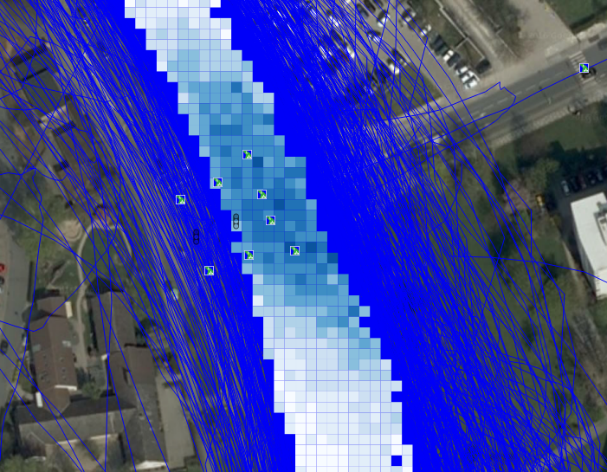
Diese Fragestellung wird derzeit in einem Projekt des Instituts für Kartographie und Geoinformatik und der iav Automotive Engineering GmbH aus Gifhorn bearbeitet. Zentraler Bestandteil der Arbeit ist die Ableitung von Bewegungsmustern der Fahrzeuge zur automatischen Ableitung der Verkehrsregelung. Zu diesem Zweck werden GPS-Trajektorien und hochauflösende Geschwindigkeitsdaten des Fahrzeuges analysiert, um geregelte Verkehrsknoten (wie Kreuzungen) und die Art ihrer Verkehrsregelung (z.B. Ampel oder Beschilderung) abzuleiten.