GeoWerkstatt-Projekt des Monats Dezember 2022
Projekt: Entwicklung einer modularen Sensorplattform zur mobilen Erfassung von Fahrzeugbegegnungen
Forschende: Tim Peter Jörg Schimansky
Projektidee: Erzeugung von Trainingsdaten für die Smartphone gestützte Erkennung von Überholvorgängen auf dem Fahrrad.
Alle, die regelmäßig Fahrrad fahren, werden es kennen: Viel zu oft wird man von Autos mit viel zu wenig Abstand überholt. Für Strecken, die man regelmäßig zurücklegt, kennt man meistens fahrradfreundliche Alternativen. Für unbekannte Strecken könnte ein Navigationssystem hilfreich sein, das Straßen anzeigt, auf denen Radfahrer seltener überholt werden und entspannter fahren können. Um entsprechende Daten zu erhalten, entwickeln wir in diesem Projekt eine Sensorplattform, die solche Überholvorgänge aufzeichnet.
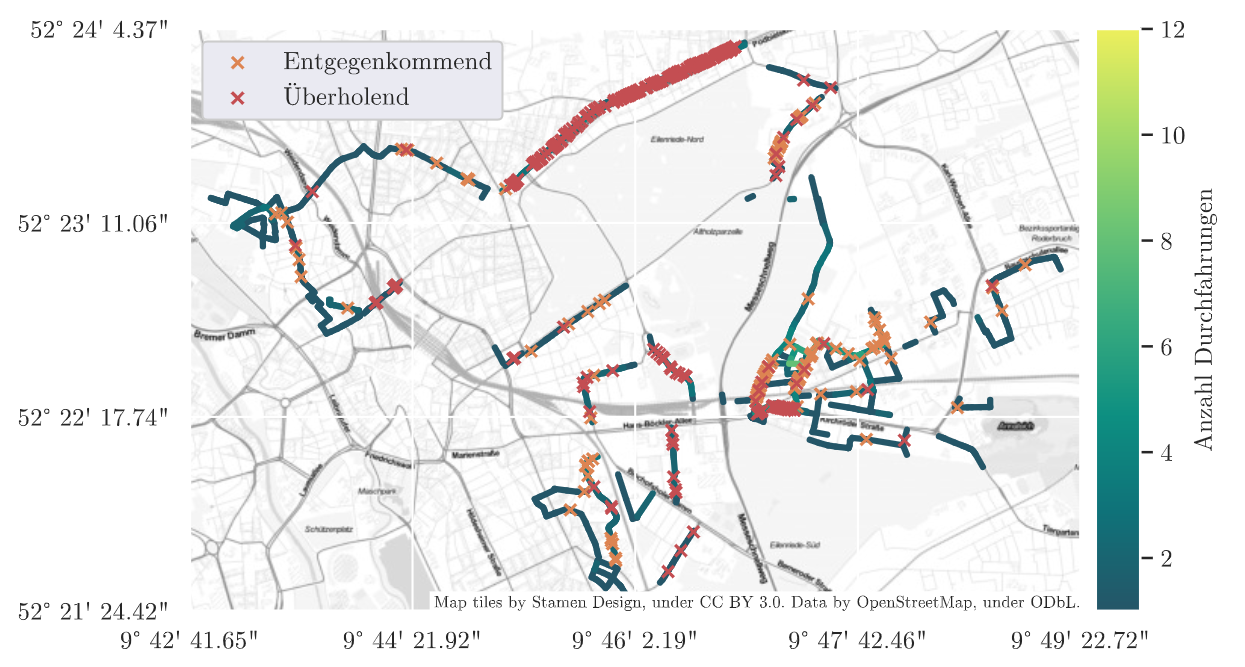
Dafür haben wir ein Fahrrad mit einem Messsystem ausgestattet, das die Position und die Abstände der Überholmanöver während der Fahrt aufzeichnet. Das System zeichnet außerdem Sensordaten eines verknüpften Smartphones auf. Wir haben das System in mehreren in Stadtteilen Hannovers (Kleefeld, Nordstadt, List, Südstadt/Bult) getestet. Dabei sind dem Messfahrrad 236 überholende und 103 entgegenkommende Fahrzeuge begegnet.
 ©
ikg | Schimansky
©
ikg | Schimansky
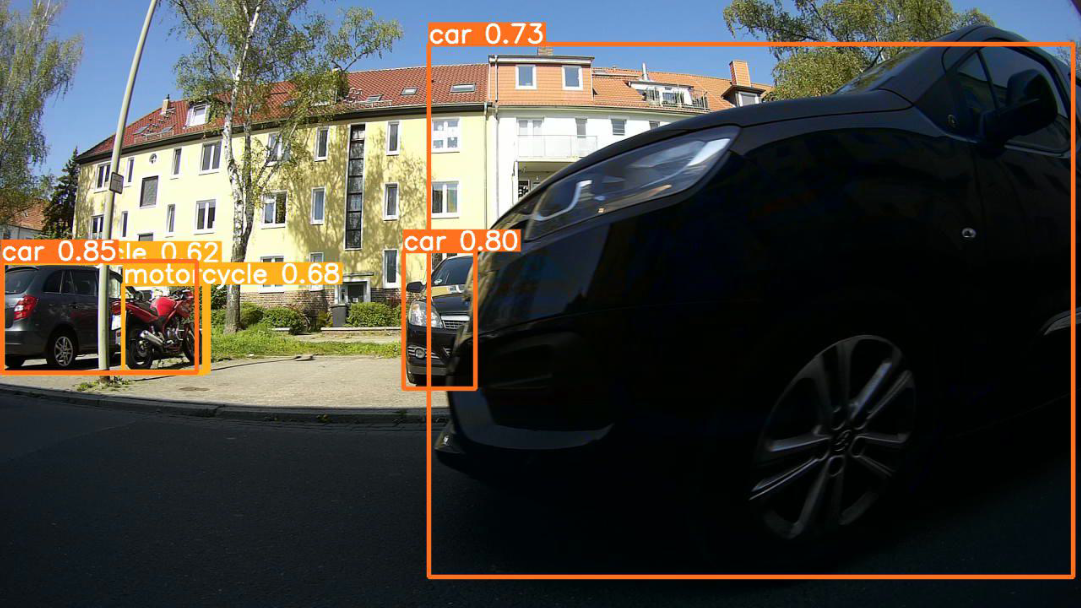
Um die Überholmanöver zu erkennen, ist am Fahrrad seitlich ein Paket aus einer Kamera und einem Ultraschall-Abstandssensor verbaut. Der Abstandssensor funktioniert ähnlich wie der Parksensor in einem Auto und liefert den ersten Anhaltspunkt dafür, dass sich ein Objekt neben dem Fahrrad befinden könnte. Um zu prüfen, ob es sich bei diesem Objekt tatsächlich um ein überholendes oder entgegenkommendes Fahrzeug handelt, nimmt die Kamera zusätzlich Bilder auf. Eine künstliche Intelligenz, das neuronale Netz "YOLO" (You Only Look Once) wertet die Bilder zuverlässig und automatisiert aus. “YOLO“ findet in Bildern Objekte, auf die es im Voraus trainiert wurde, und markiert die Objekte mit rechteckigen Umrandungen.
 ©
ikg | Schimansky
©
ikg | Schimansky
Diese Daten könnten bereits als Grundlage für die Planung einer Fahrradroute dienen. Wie in der Karte zu sehen, ist jedoch die Gesamtabdeckung noch sehr lückenhaft. Es fehlen noch viele Strecken. Daher ist die Idee, die Daten durch viele Radfahrerinnen und Radfahrer im sogenannten Crowdsourcing-Prinzip zu sammeln. Dazu fahren viele Leute ihre alltäglichen und weniger alltäglichen Routen mit dem Fahrrad, zeichnen dabei Sensordaten auf und schicken diese an eine Sammelstelle
 ©
ikg | Schimansky
©
ikg | Schimansky
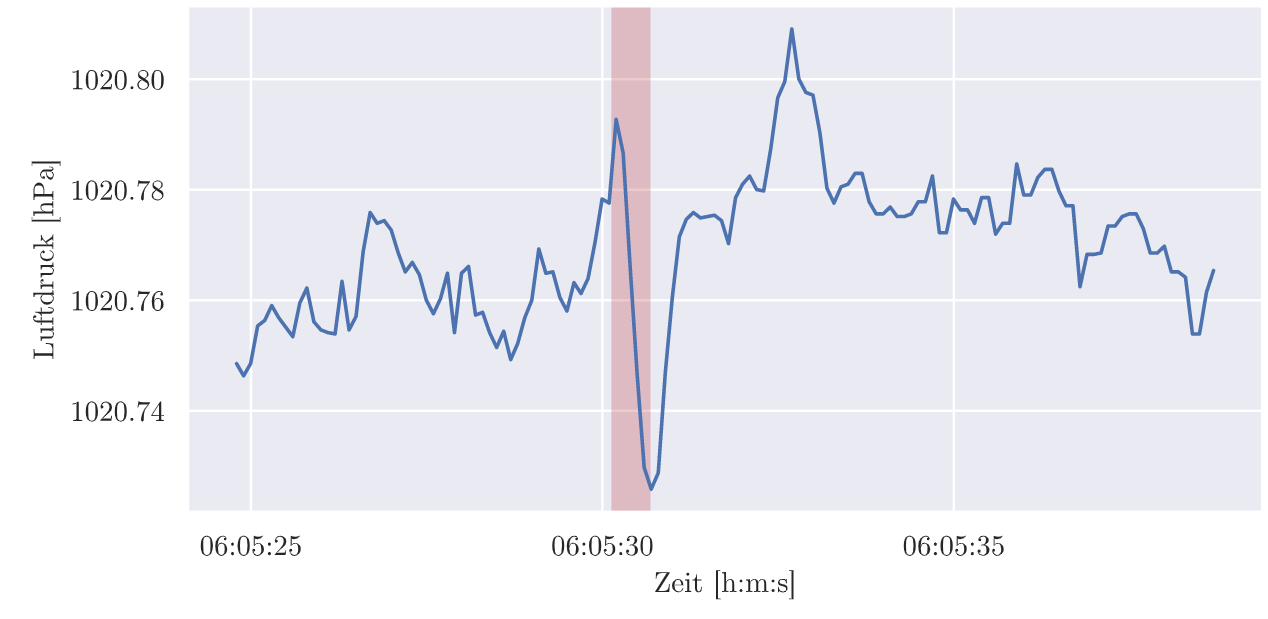
Damit sich nicht alle eine Sensorplattform mit seitlichem Abstandssensor am Fahrrad montieren müssen, haben wir zusätzlich getestet, welche Daten sich mit den Sensoren gewinnen lassen, die jeder mit einem Smartphone mit sich trägt. Bei unseren Testfahrten war daher neben der Sensorplattform auch ein Smartphone am Fahrrad befestigt. Über die Sensorplattform sind die Positionen der Überholmanöver bekannt. Deshalb haben wir die Sensordaten des Smartphones an genau diesen Zeitpunkten betrachtet. Dabei zeigte sich, dass sowohl das Magnetometer (Magnetfeldsensor) als auch das Barometer (Luftdrucksensor) durch ein fahrendes Auto beeinflusst werden.
 ©
ikg | Schimansky
©
ikg | Schimansky
Die Schlussfolgerung: Überholmanöver lassen sich auch ohne große Sensorplattform einfach aus den Sensordaten eines Smartphones ableiten. Um den Zusammenhang zwischen Sensordaten und dem Überholmanöver sicher zu bestimmen, haben wir ein Machine Learning Modell verwendet. Für das Training erhält die künstliche Intelligenz einen Ausschnitt der Daten und sucht darin nach Anhaltspunkten, anhand derer sie zwischen Überholmanöver/kein Überholmanöver am besten unterscheiden kann. Das trainierte Modell soll zukünftig unbekannte Daten betrachten und auf Basis der gelernten Zusammenhänge beurteilen, wann es sich um Überholmanöver handelt.
Auch wenn die Daten künftig vor allem über Smartphones gesammelt werden, gibt es noch Verwendung für die Sensorplattform, die sich als sehr zuverlässig erwies und einfach zu bedienen ist. Der Grundgedanke bei der Konstruktion war die Anpassbarkeit des Systems: So ließe sich das System in Zukunft durch andere Sensoren wie Laserscanner, Thermometer oder Feinstaubsensoren erweitern.





