GeoWerkstatt-Projekt des Monats Januar 2023
Projekt: Segmentierung von Korrosionsschäden an Hafenstrukturen
Forschende: Marvin Scherff, Frederic Hake, Hamza Alkhatib
Projektidee: Automatisierte Schadenssegmentierung anhand von Bildern zur Unterstützung von Bauwerksüberprüfungen von Hafenanlagen.
Wer eine Rundfahrt durch einen großen Hafen macht, ist meistens überwältigt von der Größe der Anlagen. Die Abläufe sind durchgetaktet, die komplette Infrastruktur muss einwandfrei funktionieren. Doch obwohl in Häfen vieles hochtechnisiert und automatisiert abläuft, werden die Hafenbauwerke zum Großteil noch manuell auf Schäden überprüft. Das ist nicht nur aufwendig, sondern wird auch durch schlechte Sichtverhältnisse erschwert – gerade bei den Anlagen, die sich unter der Wasseroberfläche befinden.
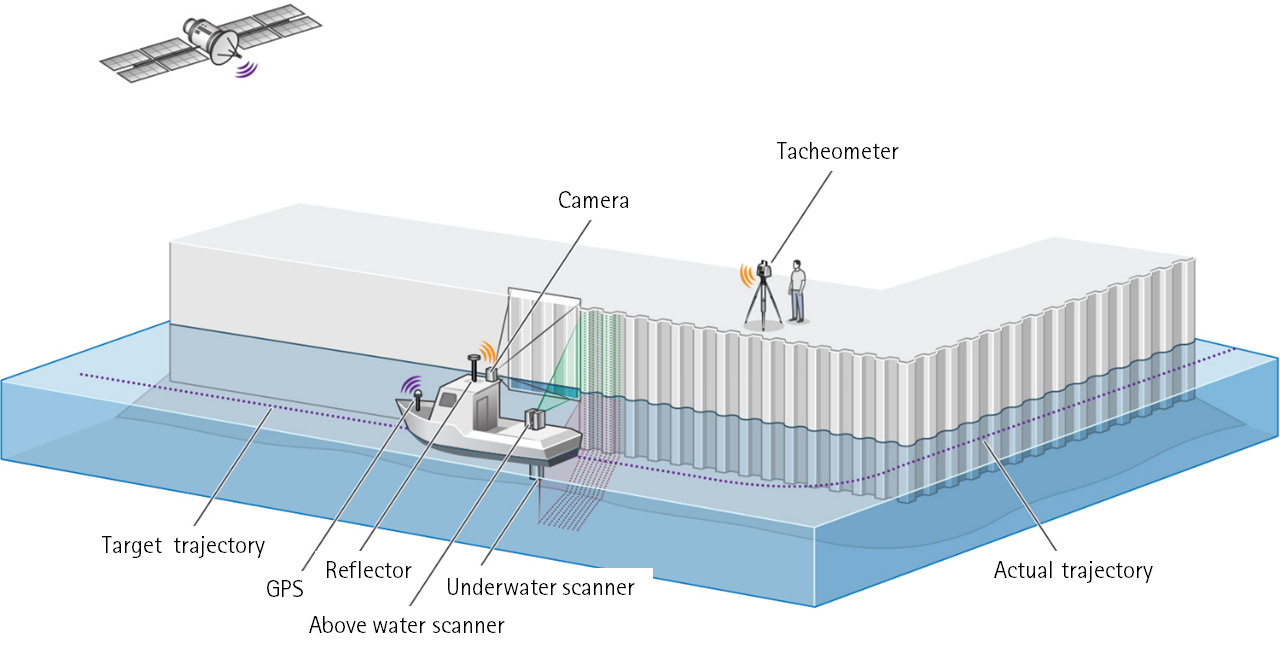
Hier setzt das Forschungsprojekt 3D HydroMapper an: Das Team hat eine schwimmende Multi-Sensor-Plattform (vgl. Abbildung 1 und Geowerkstatt Mai 2020) entwickelt. Diese kann Hafenanlagen in kurzer Zeit flächenhaft und automatisiert mit bis zu Millimetergenauigkeit aufnehmen. Die Ergebnisse werden dann in einem gemeinsamen Koordinatenrahmen zusammengeführt und können so die Grundlage für ein Building Information Model (BIM) bilden. Damit wird der aktuelle Zustand der Anlage digital sichtbar und für verschiedene Interessenten nutzbar.
Das Geodätische Institut der Leibniz Universität Hannover bearbeitet dieses Projekt in Kooperation mit Dr. Hesse und Partner Ingenieure, der WKC Hamburg GmbH, dem Fraunhofer-Institut für Großstrukturen in der Produktionstechnik IGP, der Niedersachsen Ports GmbH & Co. KG und dem Wasserstraßen- und Schifffahrtsamt Uelzen.
 ©
GIH
©
GIH
In der aktuellen Projektphase haben wir uns auf die in der Plattform verbaute Kamera fokussiert. Sie nimmt Bilder der Infrastruktur oberhalb der Wasseroberfläche auf. Diese Bilder werden mit Hilfe künstlicher Intelligenz ausgewertet, genauer gesagt mit dem Deeplab V3+ Segmentierungsnetz (von Google entwickeltes Neuronales Netz). Schäden werden so lokalisiert und korrekt klassifiziert, um sie anschließend für das BIM nutzen zu können. Diese Methode liefert besonders viele räumliche Details, weil das neuronale Netz dieselben Merkmale im Bild in verschiedenen Maßstäben analysiert.
Am Beispiel realer Daten einer von Korrosion befallenen Kaimauer des Jade-Weser-Ports in Wilhelmshaven konnten wir das neuronale Netz trainieren und die Methode optimieren. Dabei wurde insbesondere Wert auf die Wahl der Fehlerfunktion und des vorangestellten Feature Extraction Netzes gelegt. Mit dieser Art der Funktion wird der Vorhersagefehler des Netzes im Vergleich zu zuvor von Hand erstellten Segmentierungsbildern (Referenzen) beschrieben. Über die Minimierung des so im Training berechneten Fehlers werden die Parameter des Netzes, welche versuchen den funktionalen Zusammenhang zwischen Ein- und Ausgabedaten abzubilden, passend optimiert.
Das integrierte Feature Extraction Netz erkennt auf der anderen Seite Merkmale von Korrosionsschäden und unbeschädigten Mauerbereichen, welche über das menschliche Verständnis hinausgehen können. Anhand dieser Informationen kann das gesamte Netz durch weitere, jedoch ebenfalls gelernte Verarbeitungsschritte letztlich ein segmentiertes Schadensbild erzeugen. Unser erfolgreichstes Segmentierungsnetz erzielt einen Wert von 57,5 % und 94,9% bei der Intersection-over-Union (IoU) Metrik, welche die prozentuale Überlappung zwischen den prädizierten und Referenzsegmenten der beiden Klassen „Korrosion“ und (unbeschädigter) „Hintergrund“ beschreibt. Unser Ergebnis steht in einer Reihe mit anderen Ansätzen zur Korrosionserkennung, die dem Stand der Technik entsprechen.
In Abbildung 2 ist ein Beispiel für ein farbkodiertes Segmentierungsergebnis dieses Netzes zu sehen: Grün steht dabei für korrekt erkannte Schäden, Blau für fälschlicherweise als Schaden erkannte Bereiche und Rot für nicht erkannte Schäden. Dieser Ansatz ist Ausgangspunkt für die Entwicklung einer Software für die Bauwerksinspektionen der Zukunft. Mit weiteren Datensätzen können zusätzliche Schadensarten charakterisiert werden, wie z. B. Ausblühungen oder Versinterungen. Dieses Konzept eignet sich mit entsprechenden Sensoren auch für andere Infrastrukturen wie Brücken oder Tunnel.
 ©
GIH
©
GIH





