GeoWerkstatt-Projekt des Monats Juli 2023
Projekt: 5GAPS
Forschende: Faezeh Sadat Mortazavi, Olga Shkedova, Udo Feuerhake, Claus Brenner, Monika Sester
Projektidee: Voxel-based point cloud localization for smart spaces management.
How do I find a free parking space quickly? This is a question that many people ask themselves every day, especially in big cities. Currently, most of them have no choice but to drive through the streets looking for a parking space. In such a case, it would be convenient if one's own vehicle would automatically find and reserve a free parking space nearby and drive there by the quickest route. With the help of digital twins of cities, such a scenario could become reality in a few years. In addition to a powerful mobile network this requires precise, real-time three-dimensional geodata.
Our project introduce voxel-based digital twin environment for smart space management and many other use cases. The central idea is capturing the three dimensions of the environment in high resolution using a many of different sensor systems and breaking it down into billions of cubes named voxels, systematically addressing and updating them utilizing identification numbers. Thus, the system will be able to combine modern digital twins' functionality, fast, up-to-date data performance, and open new opportunities for applications. Such a virtual voxel-based representation of the real world will enable people and machines to meet the growing competition in space use in a more demand-oriented, efficient, secure, and fair way, both for themselves and in the interests of the public.
In order to fuse data from different sensors, it is necessary to align these data to the current 3D voxel model. To this end efficient localization methods are needed. For this purpose, we implement our three-step approach to a dataset collected along a residential street in Hanover, Germany, using a Riegl VMX-250 mobile mapping system and Velodyne VLP 16. The mobile mapping data provides a dense point cloud with color information which is used as the reference map, while the Velodyne scans are used to update the map.
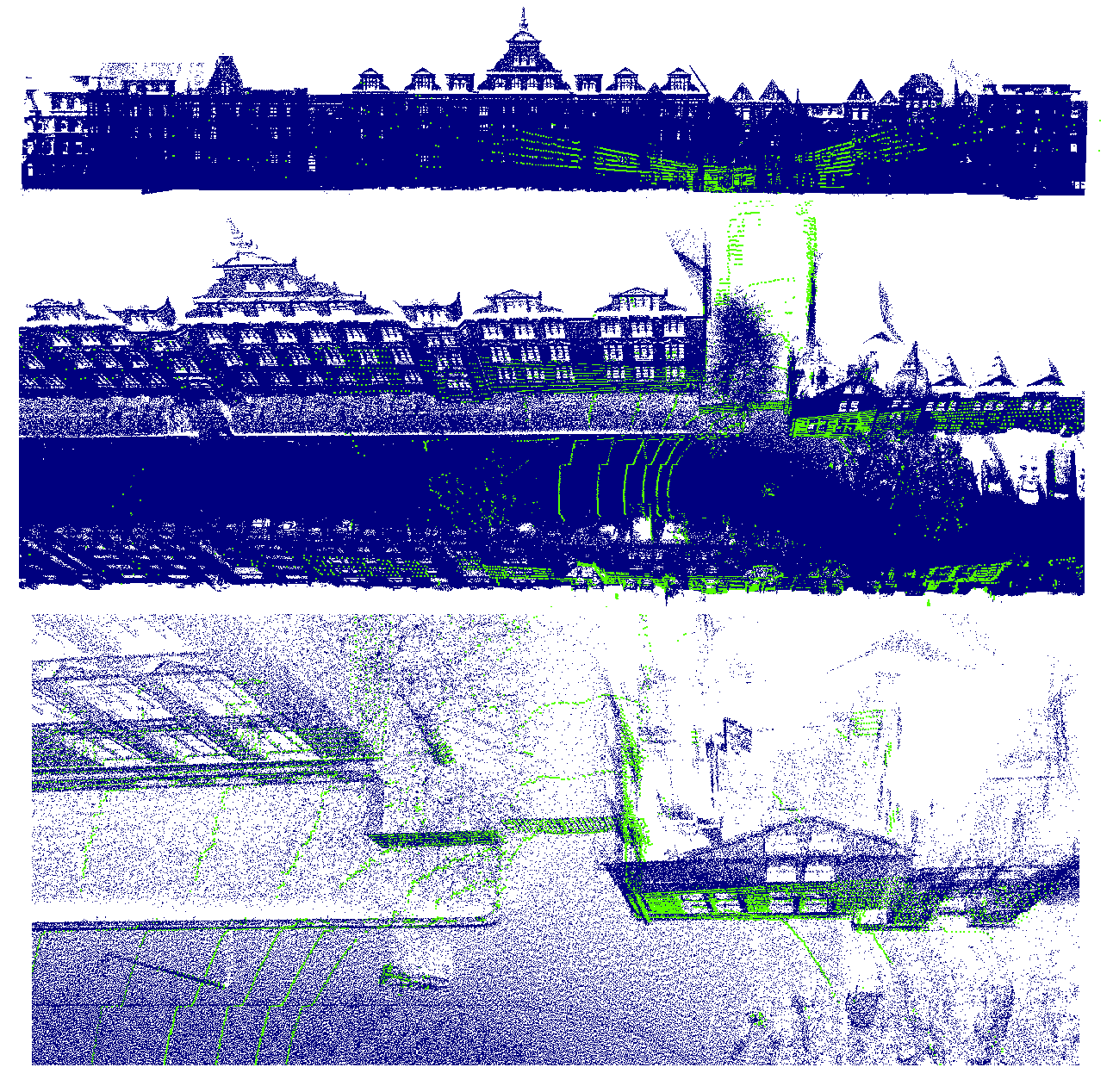
To facilitate the alignment process, we create a regular 3D grid from the reference point cloud. Each cell of the grid represents a voxel with a 10 cm edge length and contains the corresponding points of the reference point cloud. Firstly, to determine an initial alignment, we down sample the input data to 1-meter voxels. Further, using the Random Sample Consensus (RANSAC) algorithm we estimate mathematical parameters, such as transformation matrix parameters. According to the obtained parameters, we attain the coarse registration or alignment of the two point clouds. In the last step, the Point-to-Plane Iterative Closest Point (ICP) algorithm, which uses the original Velodyne scans and the transformation matrix derived from the coarse registration, is utilized. During this procedure, the rotation and translation transformation between reference and Velodyne point cloud are obtained that enable the fine registration and precise alignment of the two point clouds.
The proposed voxel-based localization approach is evaluated using 101 Velodyne scans. The estimated positions are compared to the ground truth values collected with the mobile mapping system. Error analysis in the X, Y and Z directions shows that the majority of scans have errors less than 3 cm.
 ©
ikg
©
ikg
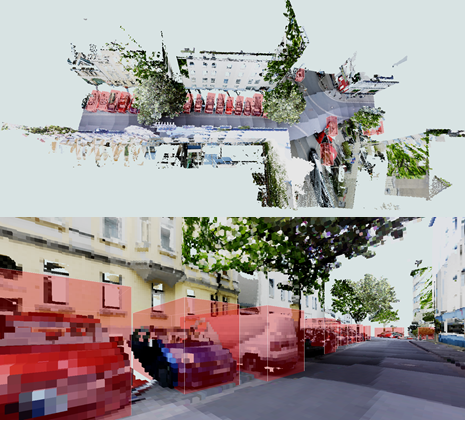
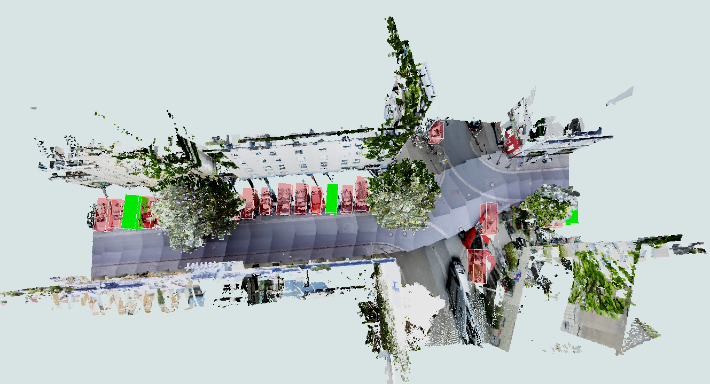
Using real-time data, the introduced localization method gives an opportunity to detect changes in the real world. For instance, to define the occupancy of parking spaces. Therefore, in the frame of our project the application of a smart parking management system is implemented in a voxel-based urban digital twin platform. It utilizes mobile mapping and Velodyne sensor data to allocate and monitor parking spaces. The process involves classifying point clouds, extracting cars, and fitting 3D bounding boxes around them. The occupancy of parking spaces is determined by detecting Velodyne points classified as cars within the bounding boxes. The results are visualized using a voxel-based urban environment with the help of the Three.js library. The approach shows promise in addressing the challenges of urban parking management and offers potential for future applications and research.
 ©
ikg
©
ikg
 ©
ikg
©
ikg





