


Im Dezember 2014 ging es los - mit einem Artikel über Roboter und Gurkenpflanzen.
Seitdem haben wir in der Reihe "GeoWerkstatt" jeden Monat ein Forschungsprojekt aus der Geodäsie und Geoinformatik an der Leibniz Universität Hannover vorgestellt.
In diesem Monat erscheint die 100. Ausgabe: Anat Schaper stellt das Projekt ihrer Masterarbeit vor, die mit dem Leo-Brandt-Preis und dem Walter-Großmann-Preis ausgezeichnet wurde. Seit August 2022 ist Anat Schaper wissenschaftliche Mitarbeiterin am Institut für Erdmessung im DFG-Graduiertenkolleg i.c.sens.
Um die Ecke gedacht: Wie Hindernisse der Satellitennavigation helfen
GeoWerkstatt-Projekt des Monats März 2023
Projekt: "Improving GNSS Shadow Matching with Diffraction Modelling" (Masterarbeit)
Forschende: Anat Schaper
Projektidee: Algorithmen zur Standortbestimmung (GNSS Shadow Matching) verbessern, indem als Diffraktion bezeichnete Beugungseffekte berücksichtigt werden
Wo ich bin und wo ich denke, dass ich bin
Vermutlich haben Sie folgendes Szenario schon häufiger beobachtet: Sie befinden sich in einer fremden Stadt und möchten sich von Ihrem Smartphone navigieren lassen. Die Standortfunktion wird aktiviert und Sie warten und warten, bis der aktuelle Standort ermittelt wird. Doch dann sieht es plötzlich auf dem Bildschirm so aus, als würden Sie mitten in einem Gebäude oder in einer Parallelstraße stehen.
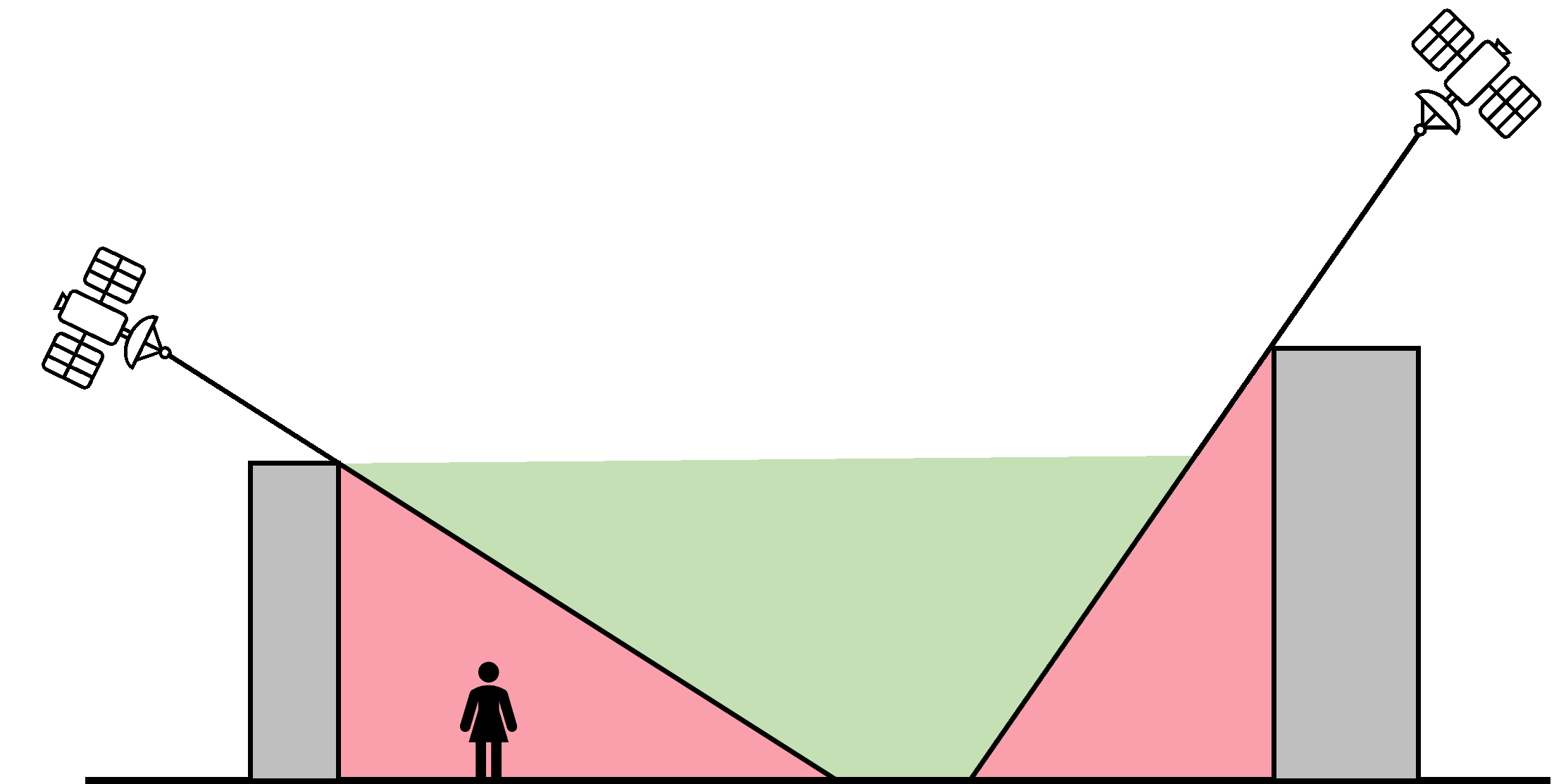
Dieses Phänomen tritt insbesondere in Städten mit großen Hochhäusern oder Wolkenkratzern wie z.B. Frankfurt am Main oder internationalen Metropolen wie New York auf. Doch auch in Städten wie Hannover kann man sich schnell darüber ärgern. Das Problem sind die umliegenden Häuser: Sie wirken als Hindernisse für GPS, oder andere GNSS-Signale, und werfen „Schatten“ auf die Straße. Diese Schatten sorgen dafür, dass die von den Satelliten ausgesendeten Signale das Smartphone entweder gar nicht erreichen oder erst über Umwege, beispielsweise weil Kanten oder Ecken von Hindernissen die Signale reflektiert oder gebeugt haben.
 ©
IfE
©
IfE
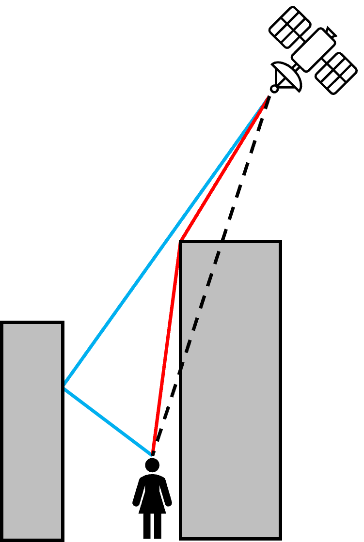
Dass in diesen Fällen der eigene Standort nicht richtig berechnet wird, liegt daran, dass zur Berechnung des Standorts die Laufzeiten der Signale zwischen Smartphone und Satelliten verwendet werden. Erreicht ein Signal das Smartphone über Umwege, ist die zurückgelegte Strecke länger als die reine Luftlinie – die berechnete Position des Smartphones kann dann sogar um einige Meter fehlerhaft sein. Besonders ungenau wird es in städtischen Umgebungen, wenn die Gebäude am Straßenrand die Sicht auf Satelliten quer zur Fahrtrichtung verdecken. Das könnte auch gefährlich werden: Würden autonome Fahrzeuge Fußwege mit Straßen verwechseln, hätte dies fatale Folgen.
 ©
IfE
©
IfE
Das Problem zur Lösung machen
Wie wäre es jedoch, wenn man sich die Schatten zu Nutze macht? Ein bereits häufig verwendeter alternativer Ansatz zur Positionierung ist das sogenannte Shadow Matching. Statt der Laufzeit des Signals kommen hier 3D-Gebäudemodelle zum Einsatz: Die Gebäudemodelle zeigen an, wo in der Nähe des Smartphone-Nutzers hohe Gebäude die direkte Sicht auf die Satelliten einschränken. Ein Satellit ist in der Theorie nur dann sichtbar, wenn die Verbindungslinie zwischen dem Smartphone und dem Satelliten nicht von einem Gebäude unterbrochen wird. Vergleicht man nun die theoretische Satellitensichtbarkeit aus dem Modell mit der tatsächlichen Sichtbarkeit, lässt sich mit Hilfe eines Bewertungsschemas bestimmen, wo der Smartphone-Nutzer wahrscheinlich steht. Und zwar dort, wo die berechneten und tatsächlichen Sichtbarkeiten am besten übereinstimmen.
Das klingt alles relativ einfach – wären da nicht die Signale, die das Smartphone über Umwege erreichen, obwohl keine direkte Sichtverbindung zum Satelliten besteht. Reflektierte Signale werden in erweiterten Shadow Matching Algorithmen bereits berücksichtigt. Die als Diffraktion bezeichneten Beugungseffekte jedoch nicht. Im Rahmen meiner Masterarbeit am Institut für Erdmessung der Leibniz Universität Hannover habe ich untersucht, wie sich diese Effekte in das konventionelle Shadow Matching einarbeiten lassen und ob sie die Standortbestimmung noch genauer machen können.
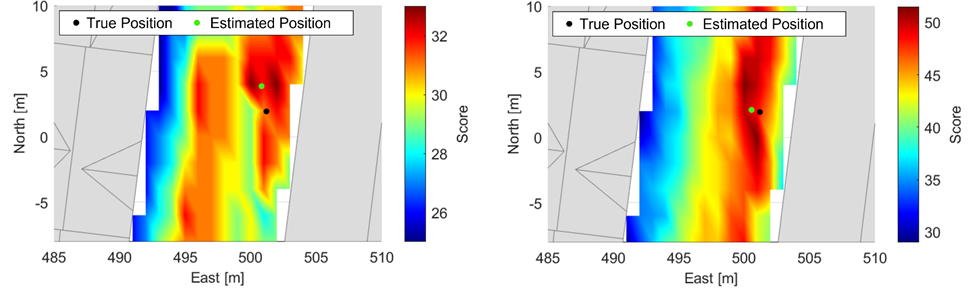
In einem Modell habe ich die Diffraktion in einer repräsentativen Straßenschlucht Hannovers simuliert und detailliert analysiert. Dazu habe ich die simulierten Signalstärken in ein Bewertungsschema integriert: Neben den sichtbaren und nicht-sichtbaren Signalen wird eine dritte Klasse – gebeugte Signale – eingeführt. Das hat einen deutlichen Effekt: Die Positionsbestimmung konnte bis zu 85% in der horizontalen Ebene und 97% quer zur Fahrtrichtung verbessert werden im Vergleich zu Bewertungsschemata, welche Diffraktion gar nicht oder nur in vereinfachter Form berücksichtigen.
 ©
IfE
©
IfE
Das zeigt: Die Genauigkeit des Shadow Matching Positionierungsalgorithmus wird deutlich höher, wenn das Verhalten von gebeugten Signalen integriert wird.





